
THAILAND OPEN ROS AND SMART ROBOT COMPETITION 2025 @HOME ROBOT
7 April 2025
This competition is one of the largest robotics events in Thailand, using ROS (Robot Operating System) as the core framework for robot control. Its purpose is to select representatives to compete at the international level. The competition is highly complex, requiring a deep understanding of the ROS architecture and the integration of various frameworks such as MoveIt!, Navigation Stack, and OpenCV to optimize the robot’s performance in areas such as motion, object detection, and image processing.
Additionally, the robot has a child-following function, utilizing AI-based detection and face recognition to ensure smooth interaction. Bounding boxes and facial landmarks are used for tracking, and when the bounding box disappears from the frame, the robot employs navigation and actionlib to follow the detected position.
Through this experience, I learned how to design new functions and features, as well as create ROS packages, messages, and services for structured robot control. These were later applied to develop a Smart Home Robot, an intelligent assistant system for home use.
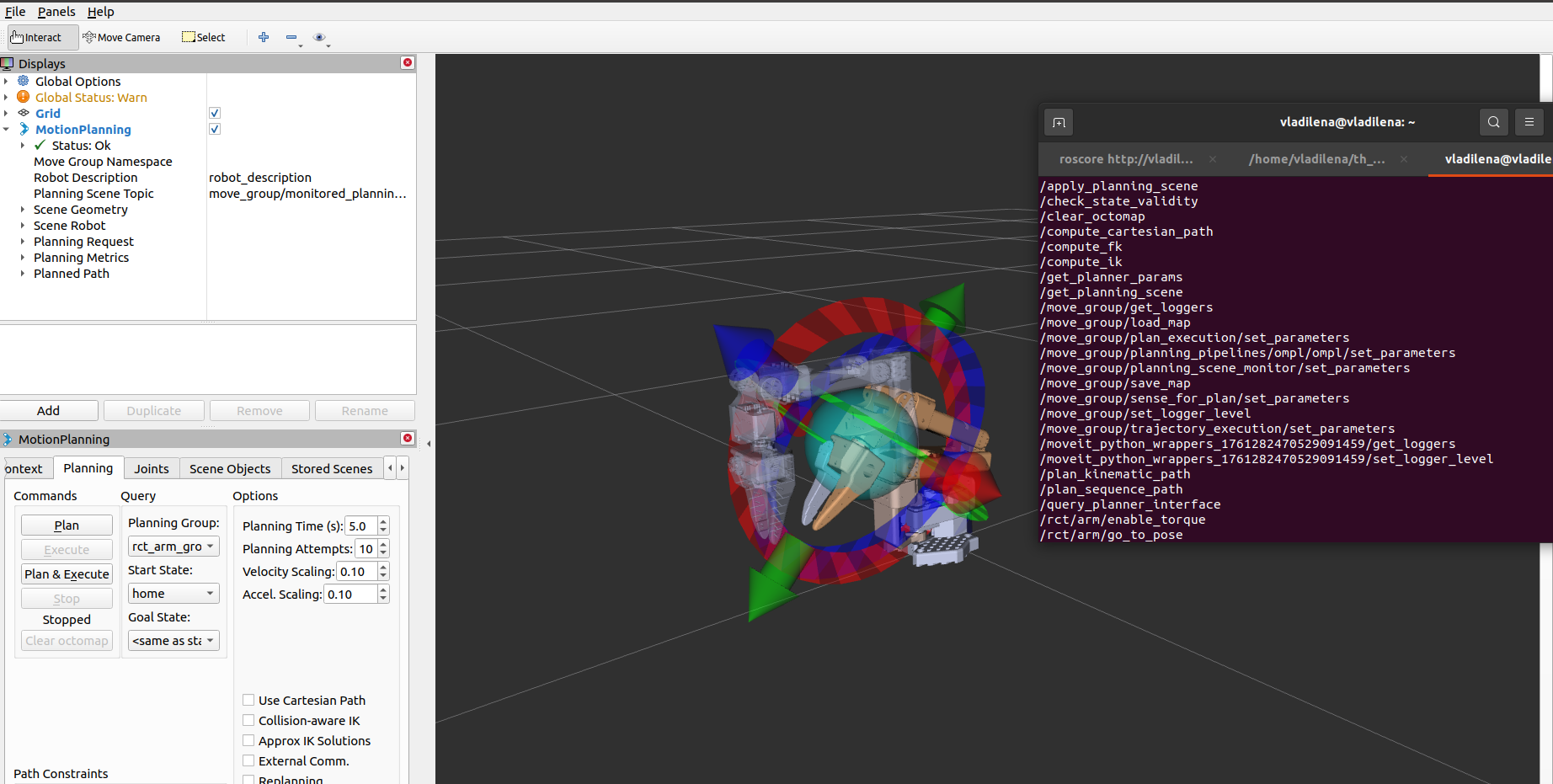
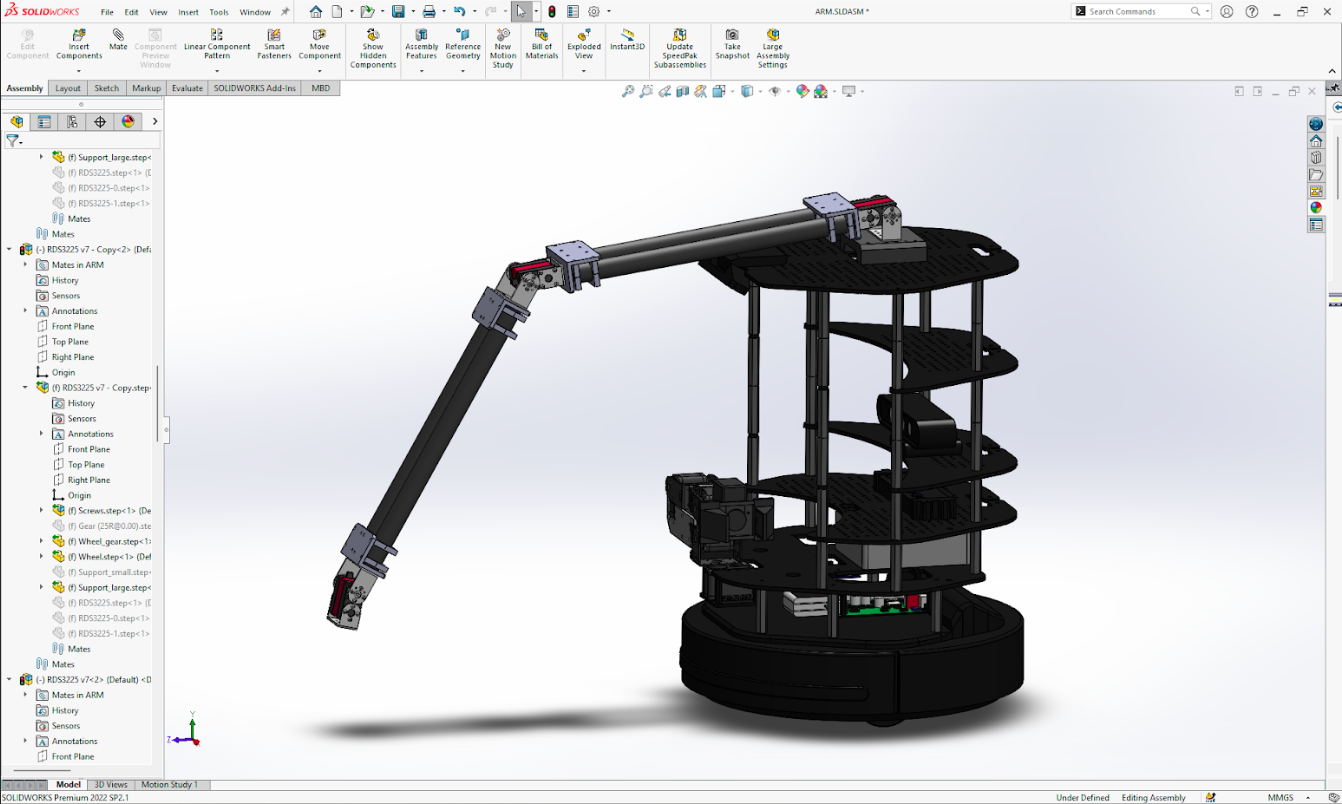
Control a robotic arm to grasp and manipulate objects
Follow a person (via Object Detection and Face Recognition)
Communicate interactively with users
Avoid obstacles inside the home
Additionally, I implemented communication between ROS Master and Slave nodes over a local LAN network to enable stable and secure remote control of the robot. The system was developed primarily using Python and C++, covering all stages from hardware assembly and sensor/motor control coding to high-level package development. This project gave me a comprehensive understanding of both software and hardware integration in robotics.

contact
INFO