STELLA: An Intelligent Assistant robot for Domestic Support and Care Powered by Artificial Intelligence Technology
5 - 6 July 2025
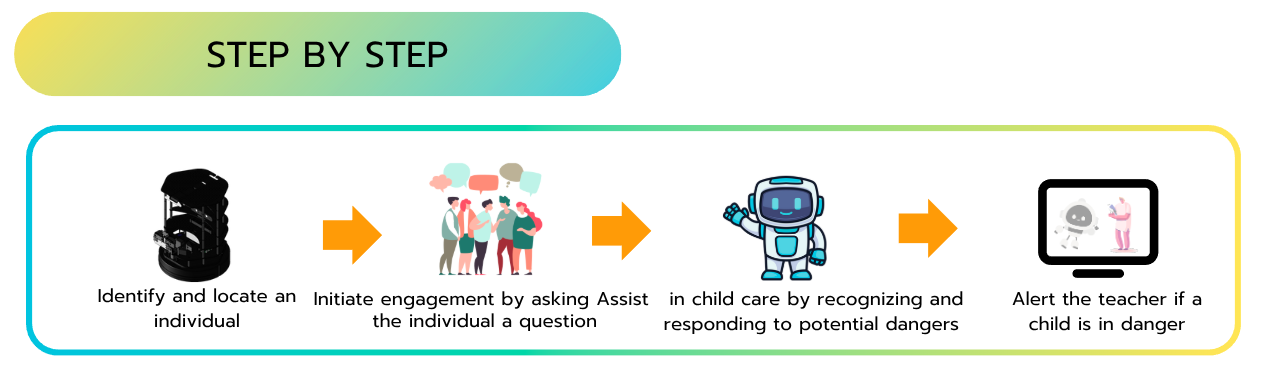
This project develops a robot designed to help care for children in kindergarten and elementary schools, addressing the issue of teacher shortages that may lead to accidents among children. The robot is designed to communicate with children in English to promote early language learning. It uses Piper TTS to generate the robot’s speech and Speech-to-Text (STT) to process the children’s spoken responses.
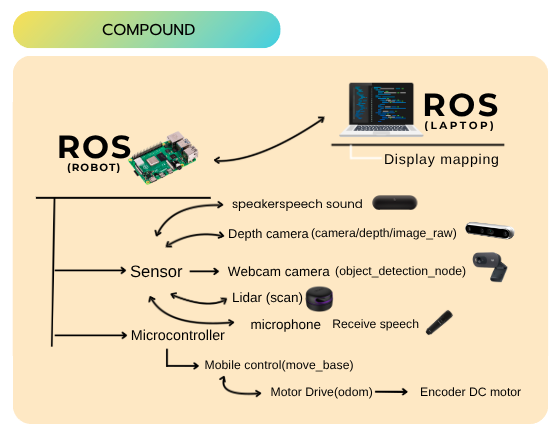
Additionally, the robot has a child-following function, utilizing AI-based detection and face recognition to ensure smooth interaction. Bounding boxes and facial landmarks are used for tracking, and when the bounding box disappears from the frame, the robot employs navigation and actionlib to follow the detected position.
Furthermore, when the robot detects that a child’s posture indicates a falling action (Action Recognition), it sends a signal through ROS, from the Master to the Slave, to notify the teacher of the situation in real time.